






Arduino Project 58- Infrared controlled robot car
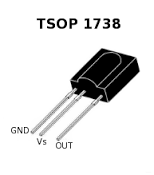
In this project, we will build an infrared remote-controlled car so that it can be controlled with any type of infrared remote control. By modifying the design of the robot avoids obstacles we will insert an infrared receiver TSOP4838 or VS1838B or a TSOP 1738 (they only change the pin configuration) instead of the ultrasonic sensor.
As we will see later it is very simple to make, and with the same program, you can add lights or a buzzer to simulate a horn.
You can buy all the components on eBay. You can this type of robot chassis:
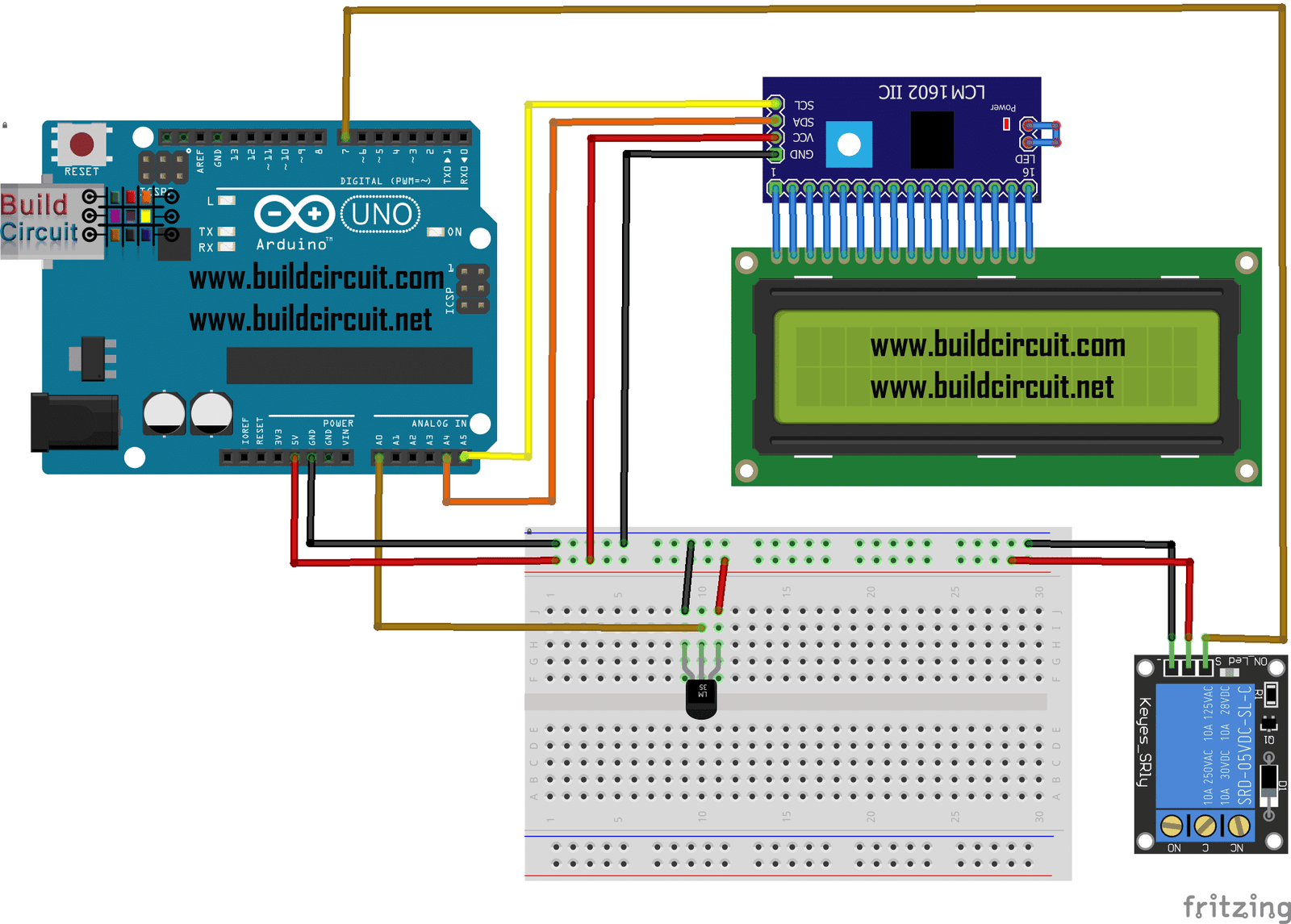
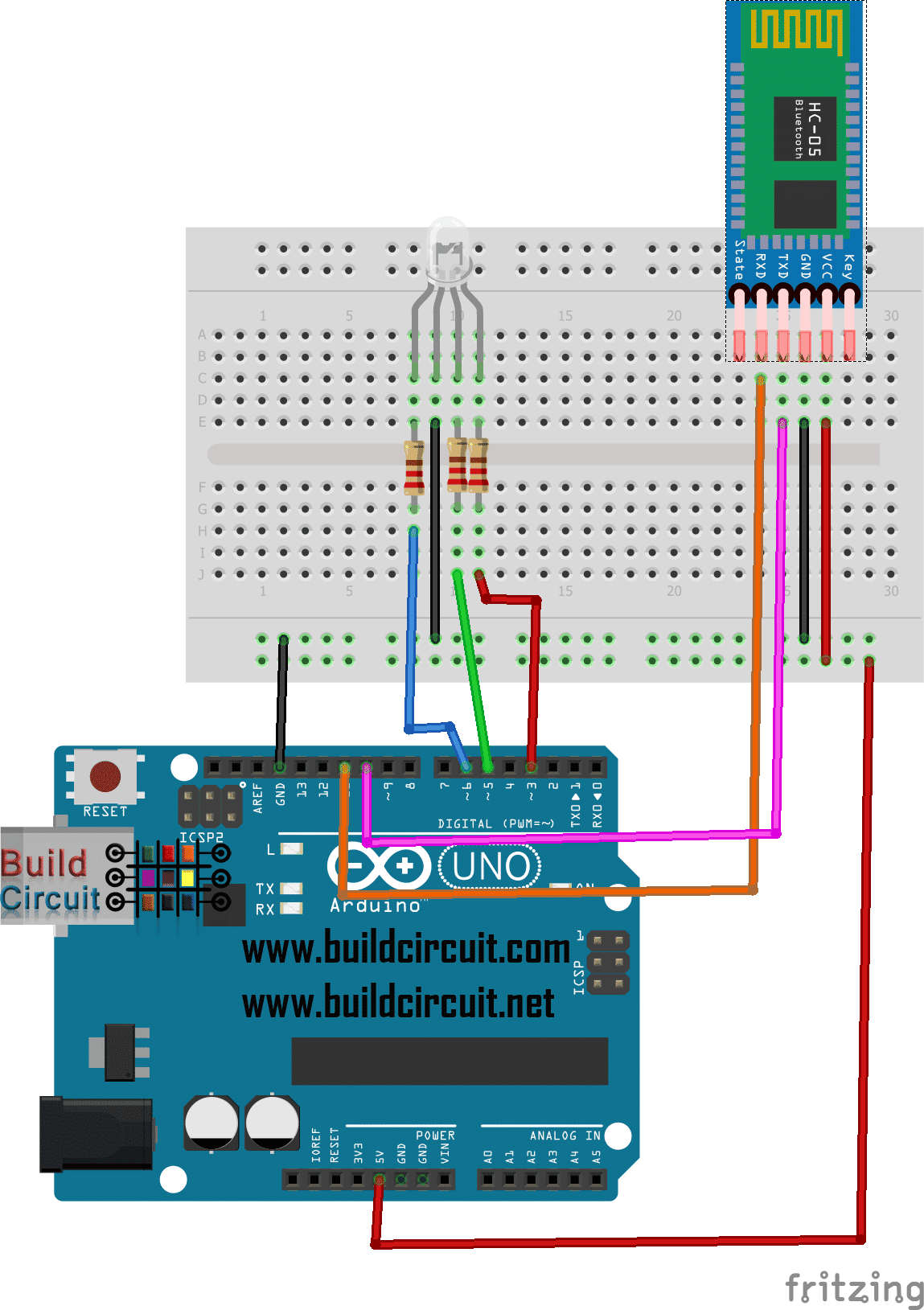
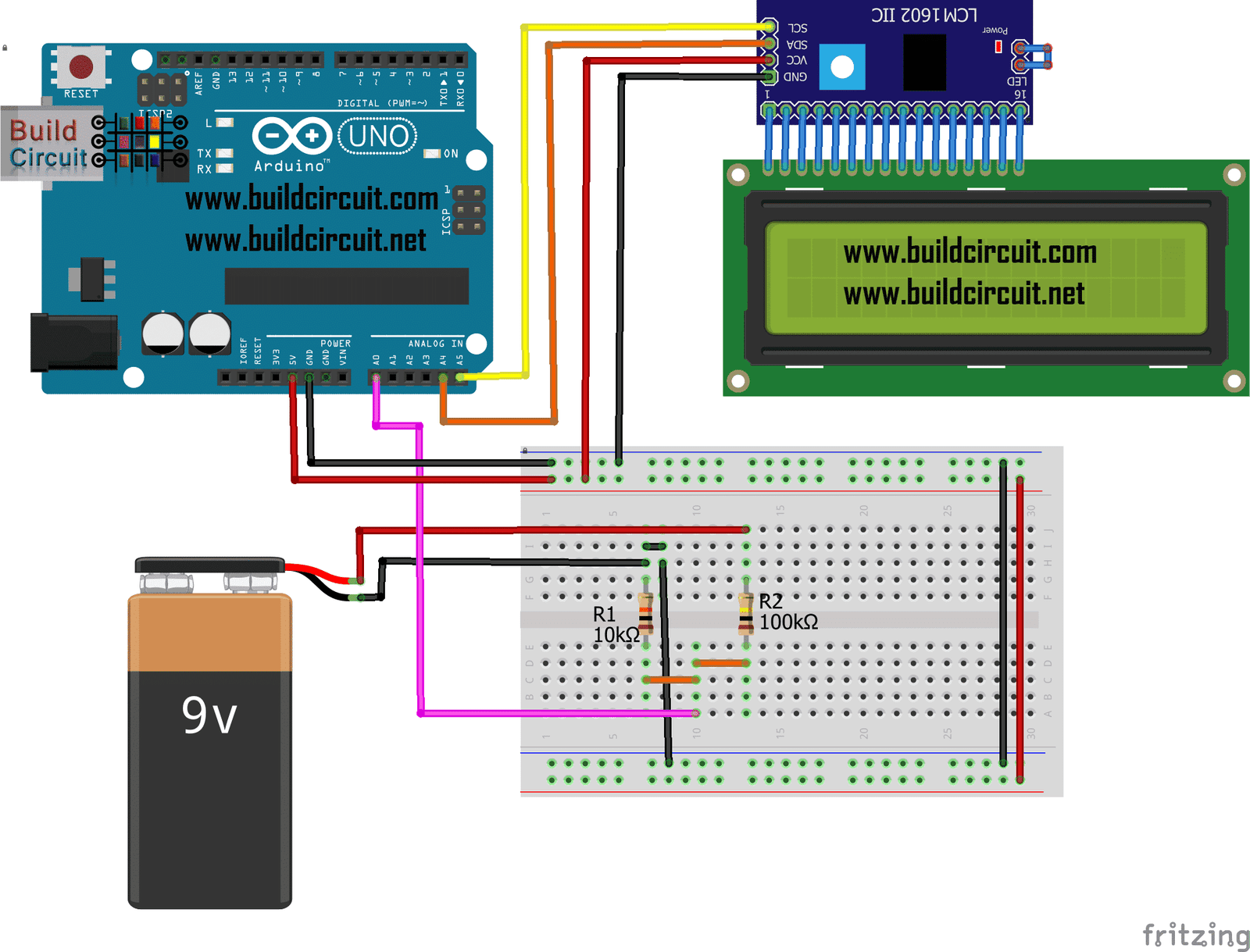
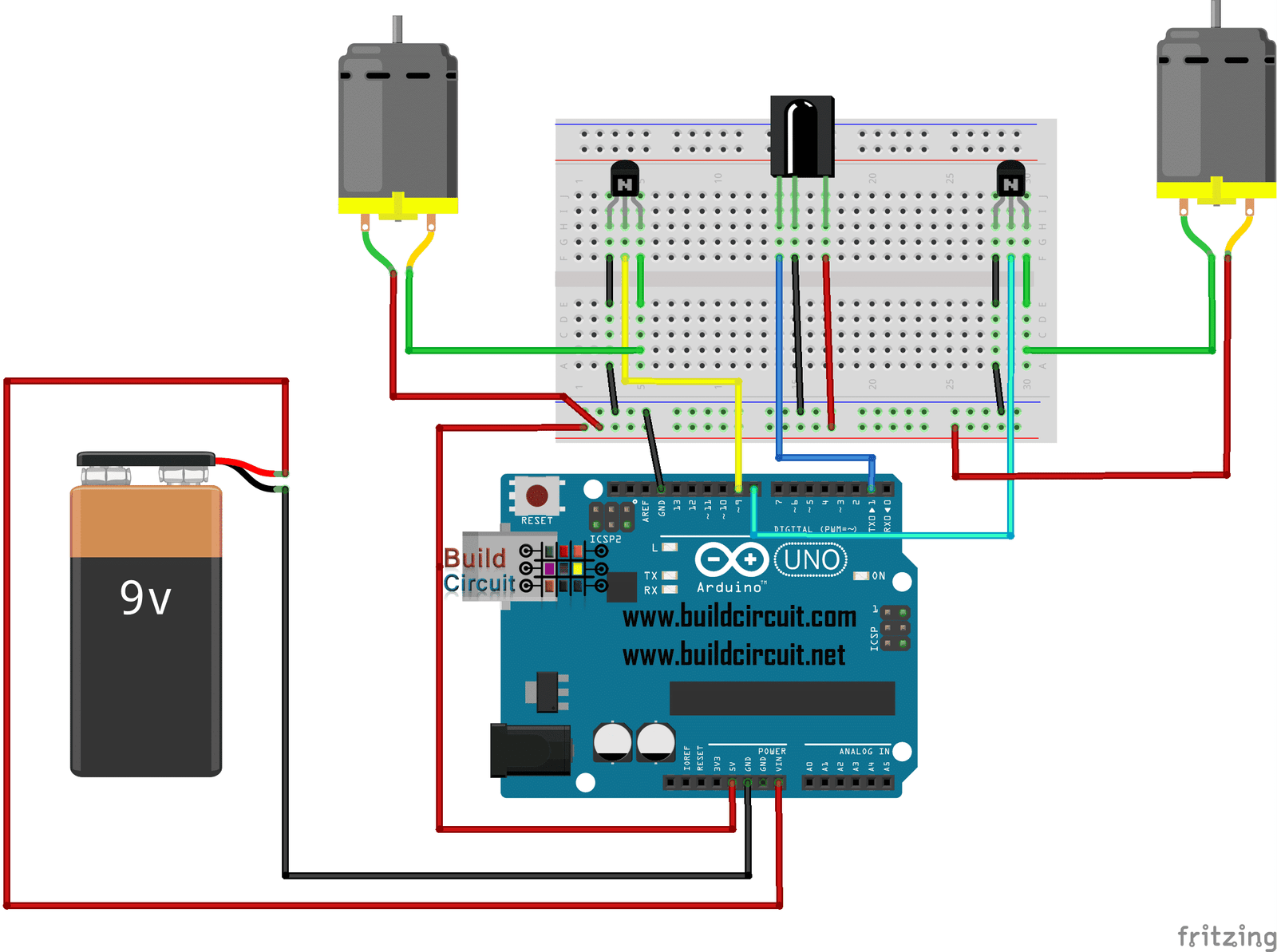
Connect all the parts looking at the schematic below:
I advise you to check the datasheet of your IR receiver before powering it, below is the connection of the TSOP1738 and VS 1838B pins respectively.

Once the connection has been made, we load the sketch that will have the function both to read the data sent by the remote control and to make the robot work itself when we press any button and then store it on the sketch.
NOTE: It requires IRremote.h library. The library can be found at the bottom of the page along with the other files. Download the latest version of the software on arduino.cc and select the program with the Arduino IDE on our tab.
Now we open the serial monitor, aim the remote control at the infrared receiver and press the buttons we wish to use to control the car, taking care to transcribe the codes of each key. It takes 4 “Forward”, “Right”, “Left” and “Stop”.
After transcribing the codes, we will now insert them in the sketch, as in the photo.
In my case the code of the NEXT button was D7E84B1B by inserting it in: if (results.value == 0xD7E84B1B) {and so I did with the other buttons.
The sketch:
Documents:
-
IRremote.h library
-
Remote tester project 1
-
Remote tester project 2
-
Remote tester using Arduino
-
Arduino project for PWM.
🛠️ Dive into our collection of DIY Kits, 🔊 Audio Amplifiers, Digital Scoreboards, FM transmitters, and more!
🎶 Explore endless possibilities at our new store.